I’ve been working on my battle bot for a while now, and finally came up with a good name. Everybody who drove the last version (including myself) described it as feeling pretty zippy, so I figure that must be what he is. Here is the current version of Zippy in all his glory:

Zippy is a 150 gram wedgebot designed to squeeze underneath opponents and push them around. One thing that immediately sticks out about Zippy is the detachable teeth at the front.

These squeeze on with some pressure, but pop off if enough force is applied. I can even spin the robot fast enough to send them flying, which is way more fun than it has any right to be. Why would I make a combat robot that falls apart instantly you may ask? Well, this Zippy is a testing platform I’m going to use try out different wedge shapes. I can print them out, pop them on, see how they work, and pull them right off again. I’m looking at drive performance, scooping ability, and of course the most important thing, how cool it looks. Once I find a wedge shape I like, I’ll reprint the chassis and the wedges as one solid piece so that they’re seamlessly attached. That way Zippy can slam into an opponent as hard as possible without loosing his teeth!
The detachable wedges might not be suitable for combat, but it occurred to me that trying to knock the wedges off another Zippy would make for a pretty fun game, with the object being to knock both of your opponent’s wedges off before they can knock off yours. Without the components to build another Zippy though, I’ll have to save that project for another time.
Anyway, another of Zippy’s interesting features is the red armor you can see wrapped around the sides and rear of the robot.

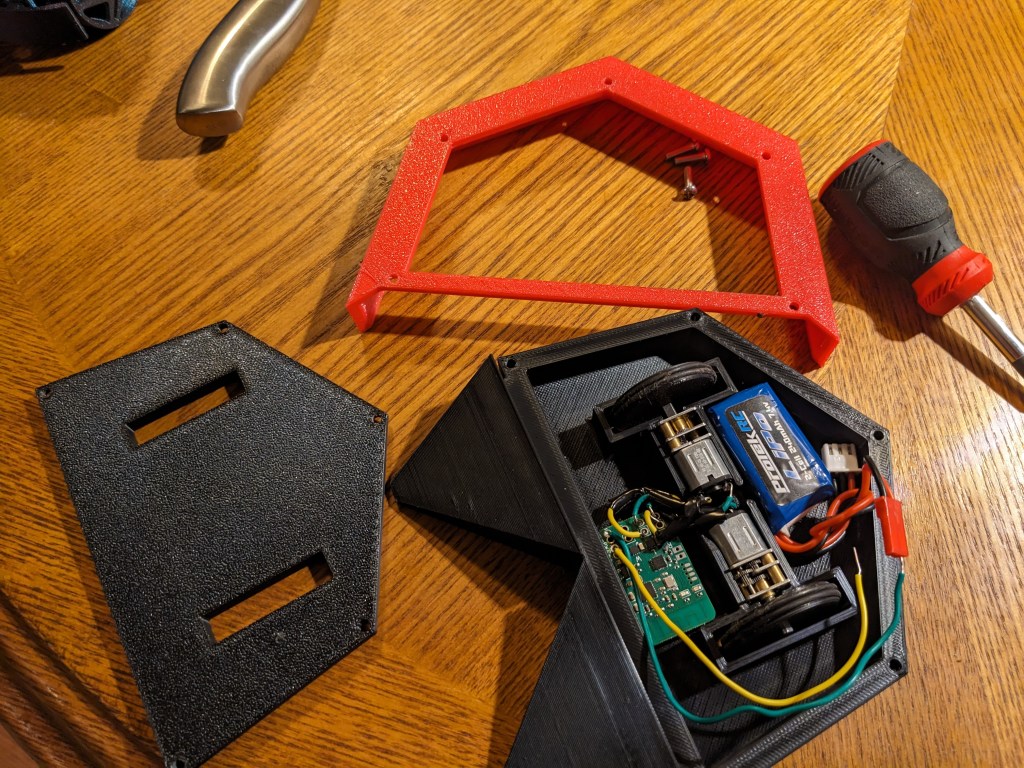
This is also modular like the wedges, but I think the attachment is secure enough that I could use it in a competition. The armor is made of TPU and is annoyingly difficult to attach to anything else due to its flexibility. That same flexibility makes it very shock absorbent though, so I need to use it to make Zippy tough enough to take big hits from spinning weapons. I decided to sandwich the TPU armor between the chassis and the top plate so that I could still use screws when putting everything together. There is also a small air gap between the armor and the frame that makes it harder to hit Zippy’s vulnerable internals like the speed controller, the battery, and the motors.

The wheels are plastic disks with a square groove that I’ve squeezed a couple of 15/16ths rubber O-rings into to serve as tires. Without the rubber tires, Zippy wouldn’t be able to move because neither of the two types of plastic I used have a high coefficient of friction. The wheels just spin and spin without them. It might be a small piece of the puzzle, but its an important one! And surprisingly complicated too. So far, the wheels have taken the most iteration to get right, but thankfully they print quickly, so I was able to get it figured out in about the same amount of time it took to solve other issues like the motor mounts and the wiring. Speaking of …
The soldering was mercifully straightforward, and all I had to do was connect the speed controller/receiver, (a Malenki Nano, amazing piece of technology btw), to the motors and the battery. Just six wires, but for a total electronics noob, putting stuff together with molten metal was pretty intimidating. Shout out to my Mom for helping me get the initial wiring done!
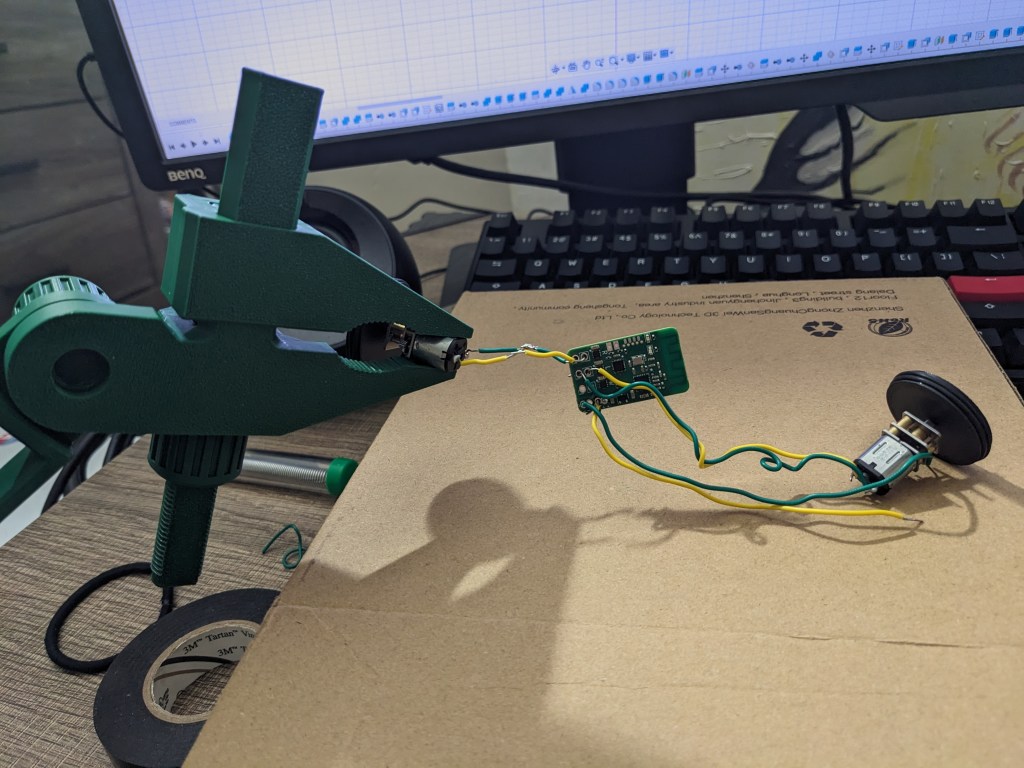
Later I went back and cut some of the wires down and resoldered them to save some space. I did this with the help of a neat build I got from a creator on thingiverse called b03tz. His Modular Arm Helper was quite useful in holding the motors while I did all that finicky soldering.
Finally, I have a video up on YouTube where you can watch Zippy drive around and push an object back and forth. You’ll also see the detachable wedges in action.
Thank you for reading!
Benjamin Hawley
